概述
DFRobot FireBeetle萤火虫系列是专为物联网设计开发的低功耗控制器系列,此款FireBeetle低功耗蓝牙控制器集成蓝牙4.1 (Bluetooth Low Energy 4.1)技术和Arduino控制器于一身,在功能上类似于上一代的Bluno系列,但是功耗更低。 FireBeetle BLE 4.1向下兼容Bluno系列 (BLE 4.0) 产品线,使用更稳定的DIALOG蓝牙4.1芯片,在产品性能上优于Bluno,支持最大传输速率4Kbyte/s,支持低功耗(25uA POWER DOWN),可以直接将该产品应用于可穿戴、智能玩具等低功耗设备中。 FireBeetle BLE 4.1主板支持多个蓝牙设备级联,并兼容Bluno的使用方式,支持接近配对(KISS连接),按住主机的BOOT按钮并靠近要连接的Peripheral设备,就可以连接。
特性
- 支持Arduino IDE编程
- 支持BLE 4.1主从机切换
- 支持蓝牙串口数据透传
- 支持蓝牙点对点无线编程
- 支持蓝牙4.1多设备级联(最多4个)
- 支持Arduino蓝牙库(支持多蓝牙连接使用)
- 支持低功耗蓝牙(待机25uA;中断70uA)
- 蓝牙进入低功耗后(AT指令),在没有任何操作的情况下,10s后进入低功耗
- 双中断唤醒:
- * BLE4.1通过D2唤醒Atmage328P(高电平唤醒)
- * Atmage328P通过D3唤醒BLE4.1(低电平唤醒)
- 支持接近式配对方法(KISS连接)
- 支持蓝牙固件更新
- 支持USB充电
- 锂电池供电
- LED状态指示灯
技术规格
- 处理器:ATMEGA328P
- Bootloader:Arduino Pro or Pro Mini,ATmega328(3.3V , 8MHz)
- 工作电压:3.3V
- VCC输入/输出电压范围:3.7V~5.5V
- 锂电池电压:3.7 V锂电池
- 支持最大无线传输速率4Kbyte/s(多个设备连接时速度会相对慢一些)
- 支持低功耗:25uA(POWER DOWN);70uA(使能相关外部中断)
- 支持最大放电电流:600mA(LDO-3.3V电源输出)
- 支持最大充电电流:400mA
- 数字IO口:14
- 模拟IO输入:6
- SPI接口:1
- I2C接口:1
- UART接口:1
- LED_BUILTIN:D13
- 接口方式:2.54mm间距(排针/排母),默认不焊接
- 模块尺寸:58 × 29(mm)
PinOut

指示灯说明
- RX:串口数据接收指示灯,当接收到串口数据时,RX亮
- TX:串口数据发送指示灯,发送串口数据时,TX灯亮
- CHG:电池充电指示灯,在没有接锂电池时,CHG闪烁;充电状态下,CHG灯常亮;充电完毕,CHG常灭
- LINK:蓝牙连接指示灯,当蓝牙连接到设备后,连接成功后常亮3s,后每3s闪烁一次,断开连接后常灭
按键说明
- BOOT:蓝牙固件更新;接近连接使能开关;
- 更新固件:按下BOOT,然后上电(插上USB),进入固件更新模式,参见固件更新版块。
- 接近连接:在蓝牙正常工作下(上电状态下),按住主机BOOT,靠近从机蓝牙设备,连接蓝牙。
- RST:复位按键
注:NC不连接,VCC为电源电压输出(5V-USB 供电时, 3.7V-锂电池供电时)
Arduino使用教程
Arduino板卡选型
对于FireBeetle BLE4.1控制器,出于低功耗的目的,选择了Arduino Pro Mini @3.3V 8MHz Bootloader,下载时请选择此板卡。

**特别注意:**由于Pro Mini采用了8MHz晶振,处理速度较慢,在使用115200波特率时,可能会出现乱码、丢包等现象,建议使用9600bps。
低功耗Arduino测试程序
BLE 4.1通过AT+LOWPOWER=ON AT指令来让蓝牙进入低功耗,在低功耗模式下,蓝牙同样可以广播、连接。当蓝牙接收到数据后,会自动唤醒,并产生一个中断信号给328p芯片,这里的中断引脚连接到328p的D2,也即是代码中的中断0口。
#include <avr/sleep.h>
void wakeup(){
sleep_disable();
delay(2000);
}
void lowpower(){
ADCSRA &= ~(1<<ADEN);/*关掉ADC*/
TWCR &= ~(1<<TWEN);/*关掉TWI*/
delay(10);
set_sleep_mode(SLEEP_MODE_PWR_DOWN);/*设置睡眠模式为掉电模式*/
sleep_enable();/*启用睡眠模式*/
MCUCR |= (1<<BODS|1<<BODSE);
MCUCR = MCUCR & (~(1<<BODSE)) | (1<<BODS);
sleep_cpu();/*进入睡眠模式*/
}
void setup() {
attachInterrupt(0, wakeup, CHANGE); /*设置触发D2口的中断方式为电平变化,回调函数为wakeup(),即执行唤醒328p芯片的功能*/
lowpower();
}
void loop() {
lowpower();
delay(2000);
}- 在此低功耗模式下,FireBeetle Board-328P with BLE4.1主板整体功耗约70uA
- 如果关闭中断及其他外设,FireBeetle Board-328P with BLE4.1主板整体功耗约25uA
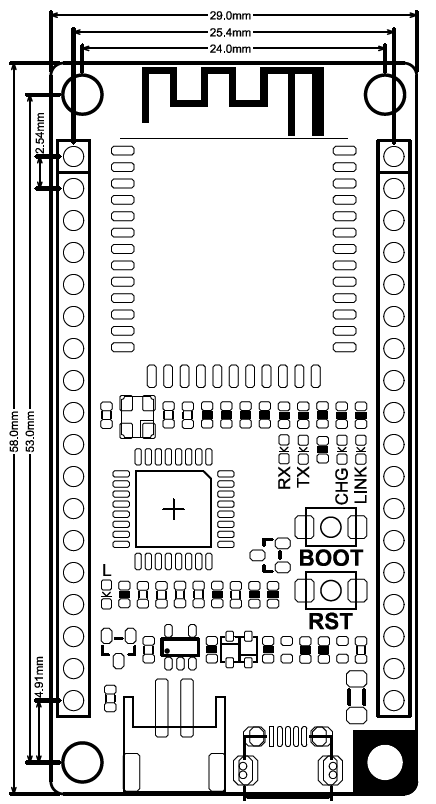
尺寸图
- pin脚间距:2.54mm
- 安装孔间距:24mm/53mm
- 安装孔尺寸:3.1mm
- 主板尺寸:29.00mm×58.00mm
- 板厚:1.6mm