简介
这是一款高性价比的红外激光测距传感器,拥有高精度、远距离测距、可视红外激光、小视场角等特性。室内测量距离0.05-80m,室外测量距离0.05-50m,串口输出,兼容Arduino等多种控制板。可用于无人机降落、电子尺以及大型粮仓料位机等应用场景中。
注意: 对不同的测量目标和测量环境,由于环境光强度过大、环境温度过高或者过低、目标反光过弱或过强,或者目标表面粗糙不平,都可能引起测程缩短或者对测量结果产生较大误差。
技术规格
- 电源电压:DC3.3V~5V
- 测量范围: 室外0.05-50m,室内0.05-80m
- 测量精度(标准差):±1.0mm
- 激光类型:620~690nm
- 激光等级:Ⅱ级,<1mW
- 在距离m处光斑直径:6mm@10m,30mm@50m
- 单次测量时间:0.05~1s
- 防护等级:IP40
- 工作温度:-10~+60℃
- 贮存温度:-20~+80℃
- 重量:约60g
- 尺寸(长×宽×高):48×42×18mm
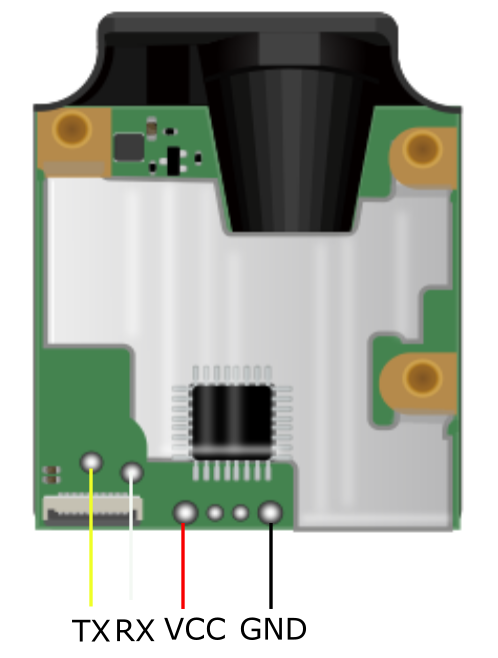
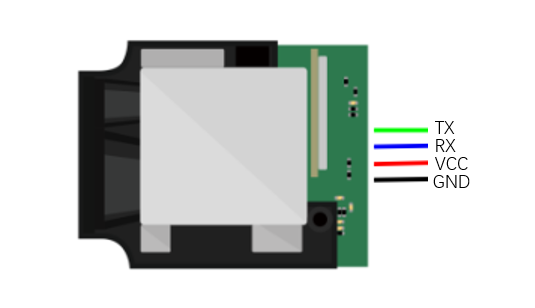
引脚示意图
使用教程
准备
- 硬件
Arduino UNO x1
红外激光测距传感器 x1
- 软件
Arduino IDE,点击下载 Arduino IDE
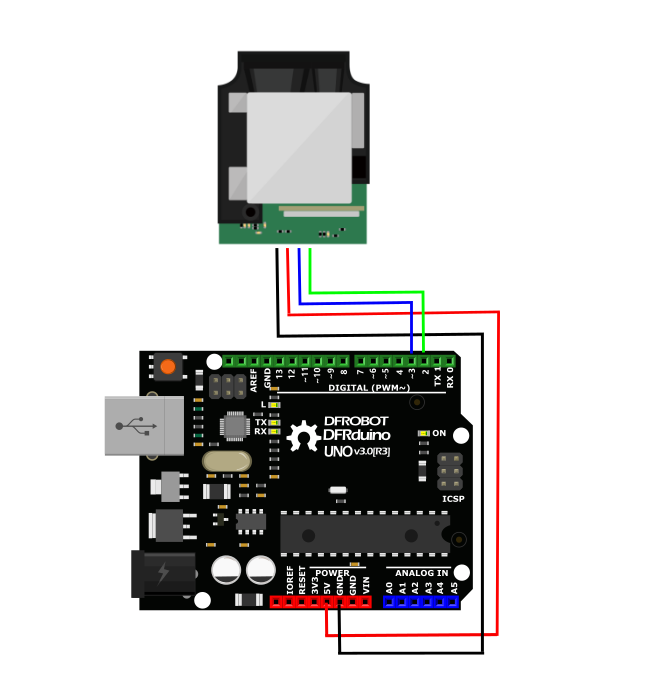
接线图
示例代码
/*!
* @File DFRobot_IraserSensor.ino
* @brief In this example, the infrared laser ranging sensor is used to measure the distance, and the sensor data is processed to obtain the measured distance
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [liunian](nian.liu@dfrobot.com)
* @version V1.0
* @date 2020-08-13
*/
#include <SoftwareSerial.h>
SoftwareSerial mySerial(2,3);//定义软串口,3号端口为TX,2号端口为RX
char buff[4]={0x80,0x06,0x03,0x77};
unsigned char data[11]={0};
void setup()
{
Serial.begin(115200);
mySerial.begin(9600);
}
void loop()
{
mySerial.print(buff);
while(1)
{
if(mySerial.available()>0)//判断串口是否有数据可读
{
delay(50);
for(int i=0;i<11;i++)
{
data[i]=mySerial.read();
}
unsigned char Check=0;
for(int i=0;i<10;i++)
{
Check=Check+data[i];
}
Check=~Check+1;
if(data[10]==Check)
{
if(data[3]=='E'&&data[4]=='R'&&data[5]=='R')
{
Serial.println("Out of range");
}
else
{
float distance=0;
distance=(data[3]-0x30)*100+(data[4]-0x30)*10+(data[5]-0x30)*1+(data[7]-0x30)*0.1+(data[8]-0x30)*0.01+(data[9]-0x30)*0.001;
Serial.print("Distance = ");
Serial.print(distance,3);
Serial.println(" M");
}
}
else
{
Serial.println("Invalid Data!");
}
}
delay(20);
}
}
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖