简介
BME680环境传感器是一款四合一MEMS环境传感器,可测量VOC(挥发性有机物)、温度、湿度、气压这四个参数,非常适用于监测空气质量。由于采用了MEMS技术,该传感器体积小、功耗低,因此也适用于低功耗场合,如可穿戴等。 DFRobot Gravity BME680环境传感器采用Gravity I2C接口,即插即用,连线简单方便;板载电源稳压芯片和电平信号转换芯片,兼容性好,可直接兼容3.3V和5V系统;预留了SPI接口,方便做扩展。本产品集成度高,可同时检测四个环境参数,是气象站、智能家居、物联网、可穿戴等场景的理想选择。 使用本产品,可迅速搭建出一套空气质量检测仪。当今空气污染越来越严重,有毒物质超标的家具屡屡出现,因此是时候为自己的健康把关了。
技术规格
- 输入电压:3.3V-5.0V
- 工作电流:5mA(开启VOC测量后,工作电流为25mA)
- 通信接口:Gravity I2C
- 预留接口:SPI
- 温度测量范围:-40℃~+85℃
- 温度测量精度:±1.0℃(0~65℃)
- 湿度测量范围:0-100%r.H.
- 湿度测量精度:±3%r.H.(20-80% r.H.,25℃)
- 气压测量范围:300-1100hPa
- 气压测量精度:±0.6hPa(300-1100hPa,0~65℃)
- IAQ(室内空气质量)范围:0-500(值越大,空气质量越差)
- 模块尺寸:30 × 22(mm) / 1.18 x0.87(inches)
IAQ(室内空气质量)对照表

引脚说明
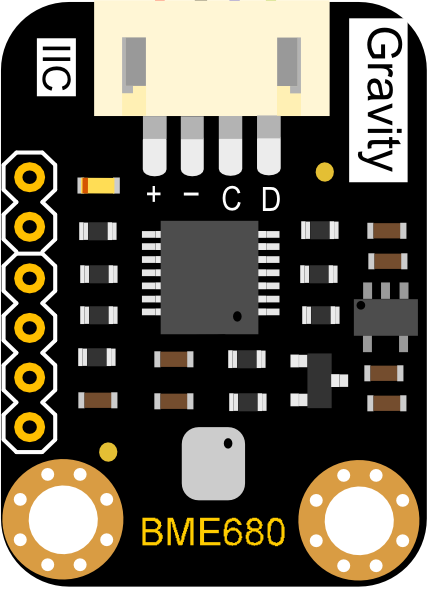
BME680环境传感器引脚说明
| 标号 | 名称 | 功能描述 |
|---|---|---|
| + | VCC | 3.3~5V |
| - | GND | GND |
| C | SCL | I2C-SCL |
| D | SDA | I2C-SDA |
使用教程
本教程将演示如何使用这个传感器模块。 目前,只有FireBeetle ESP8266 WiFi 物联网开发板能读取IAQ数值,其他主控器暂不支持。
准备
硬件
- Arduino Uno(或类似的主控板) x1
- BME680环境传感器模块 x1
- Gravity 4P传感器连接线或杜邦线 x1
软件
- Arduino IDE (1.0.x或1.8.x), 点击下载Arduino IDE
- 下载Arduino库文件,点击下载 如何安装库文件,点击链接
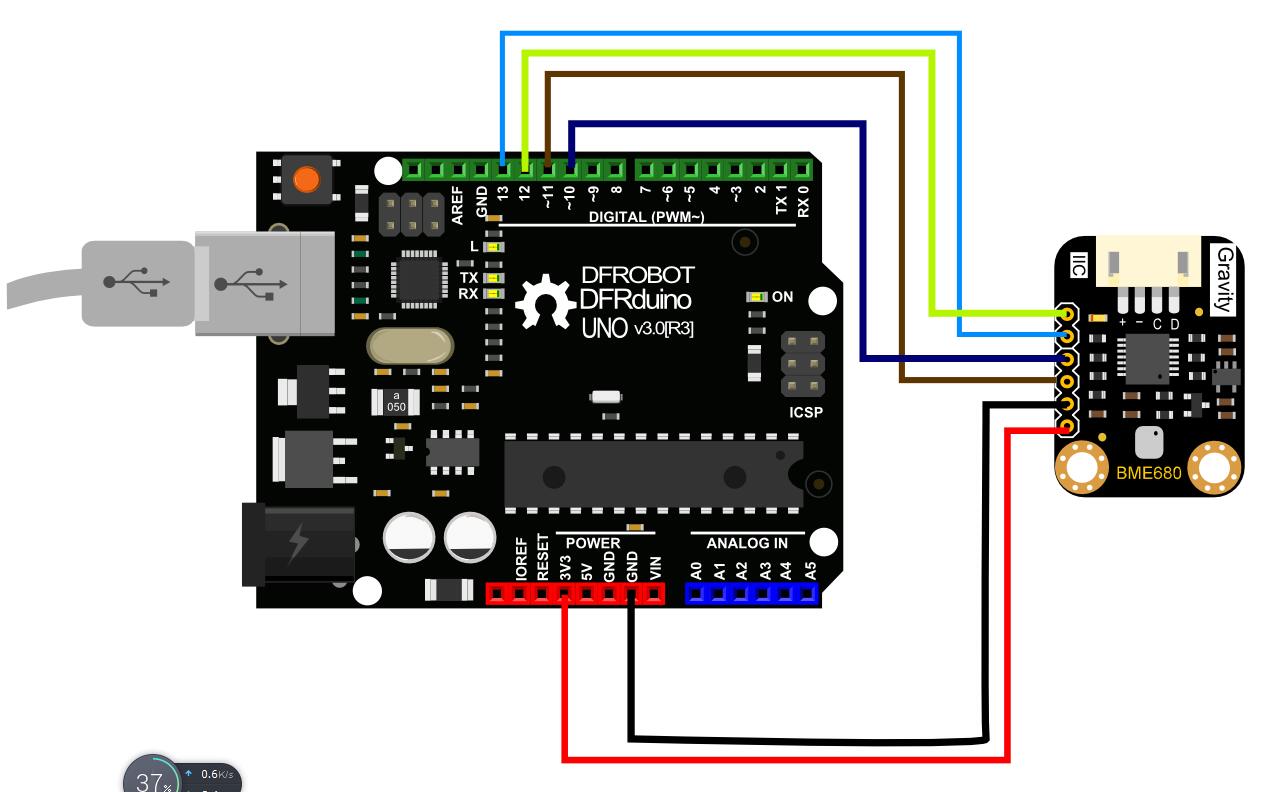
接线图
- 本产品支持I2C接口与SPI接口。使用时,请根据选用的通信接口,选择对应的连线方式。连线方式参考下图。
- 推荐使用I2C接口方式,即插即用,简单易用。
- 若使用SPI接口,则模块使用3.3V供电
I2C连接图
请务必注意线序,VCC接电源,GND接地

SPI连接图
请务必注意线序,VCC接3.3V,GND接地
样例代码
请先安装Arduino库文件,点击下载 本样例代码采用I2C接口。SPI接口的样例代码请至库文件中查找DFRobot_BME680_SPI.ino文件,由于功能一致,不在此展示代码。 为准确测量海拔值,需要进行校准。上传代码前,请将您所在地区的海拔值填入样例代码中的语句中:seaLevel = bme.readSeaLevel(您所在地区的海拔值);
读取数据(无IAQ指数)
程序功能:读取传感器数据,并进行串口打印。(不带IAQ)
/*
file DFRobot_BME680_I2C.ino
@ https://github.com/DFRobot/DFRobot_BME680
connect bme680 I2C interface with your board (please reference board compatibility)
Temprature, Humidity, pressure, altitude, calibrate altitude and gas resistance data will print on serial window.
Copyright [DFRobot](https://www.dfrobot.com), 2016
Copyright GNU Lesser General Public License
version V1.0
date 2017-12-7
*/
#include "DFRobot_BME680_I2C.h"
#include "Wire.h"
/*use an accurate altitude to calibrate sea level air pressure*/
#define CALIBRATE_PRESSURE
DFRobot_BME680_I2C bme(0x77); //0x77 I2C address
float seaLevel;
void setup()
{
uint8_t rslt = 1;
Serial.begin(9600);
while (!Serial);
delay(1000);
Serial.println();
while (rslt != 0) {
rslt = bme.begin();
if (rslt != 0) {
Serial.println("bme begin failure");
delay(2000);
}
}
Serial.println("bme begin successful");
#ifdef CALIBRATE_PRESSURE
bme.startConvert();
delay(1000);
bme.update();
/*You can use an accurate altitude to calibrate sea level air pressure.
And then use this calibrated sea level pressure as a reference to obtain the calibrated altitude.
In this case,525.0m is chendu accurate altitude.
*/
seaLevel = bme.readSeaLevel(525.0);
Serial.print("seaLevel :");
Serial.println(seaLevel);
#endif
}
void loop()
{
bme.startConvert();
delay(1000);
bme.update();
Serial.println();
Serial.print("temperature(C) :");
Serial.println(bme.readTemperature() / 100, 2);
Serial.print("pressure(Pa) :");
Serial.println(bme.readPressure());
Serial.print("humidity(%rh) :");
Serial.println(bme.readHumidity() / 1000, 2);
Serial.print("gas resistance(ohm) :");
Serial.println(bme.readGasResistance());
Serial.print("altitude(m) :");
Serial.println(bme.readAltitude());
#ifdef CALIBRATE_PRESSURE
Serial.print("calibrated altitude(m) :");
Serial.println(bme.readCalibratedAltitude(seaLevel));
#endif
}读取数据(带IAQ数值)
程序功能:读取传感器数据,并进行串口打印。(带IAQ) 目前,只有FireBeetle ESP8266 WiFi物联网开发板能读取IAQ数值,其他主控器暂不支持。 对于FireBeetle ESP8266 WiFi物联网开发板,请使用Arduino IDE 1.8版本,并需要将SDK升级至2.3.1及以上。升级方法参考FireBeetle ESP8266维库的第5.2节内容。
/*
file DFRobot_BME680_I2C.ino
@ https://github.com/DFRobot/DFRobot_BME680
connect bme680 I2C interface with your board (please reference board compatibility)
Temprature, Humidity, pressure, altitude, calibrated altitude, gas resistance and IAQ data will be printed via serial.
Copyright [DFRobot](https://www.dfrobot.com), 2016
Copyright GNU Lesser General Public License
version V1.0
date 2017-12-7
*/
#include "DFRobot_BME680_I2C.h"
#include "Wire.h"
/*use an accurate altitude to calibrate sea level air pressure*/
#define CALIBRATE_PRESSURE
DFRobot_BME680_I2C bme(0x77); //0x77 I2C address
float seaLevel;
void setup()
{
uint8_t rslt = 1;
Serial.begin(115200);
while (!Serial);
delay(1000);
Serial.println();
while (rslt != 0) {
rslt = bme.begin();
if (rslt != 0) {
Serial.println("bme begin failure");
delay(2000);
}
}
Serial.println("bme begin successful");
bme.supportIAQ();
}
void loop()
{
static uint8_t calibrated = 0;
#ifdef CALIBRATE_PRESSURE
if (calibrated == 0) {
if (bme.iaqUpdate() == 0) {
/*You can use an accurate altitude to calibrate sea level air pressure.
And then use this calibrated sea level pressure as a reference to obtain the calibrated altitude.
In this case,525.0m is chendu accurate altitude.
*/
seaLevel = bme.readSeaLevel(525.0);
Serial.print("seaLevel :");
Serial.println(seaLevel);
calibrated = 1;
}
}
#else
calibrated = 1;
#endif
if (calibrated) {
uint8_t rslt = bme.iaqUpdate();
if (rslt == 0) {
Serial.println();
Serial.print("timestamp(ms) :");
Serial.println(millis());
Serial.print("temperature(C) :");
Serial.println(bme.readTemperature(), 2);
Serial.print("pressure(Pa) :");
Serial.println(bme.readPressure());
Serial.print("humidity(%rh) :");
Serial.println(bme.readHumidity(), 2);
Serial.print("altitude(m) :");
Serial.println(bme.readAltitude());
#ifdef CALIBRATE_PRESSURE
Serial.print("calibrated altitude(m) :");
Serial.println(bme.readCalibratedAltitude(seaLevel));
#endif
Serial.print("gas resistance :");
Serial.println(bme.readGasResistance());
if (bme.isIAQReady()) {
Serial.print("IAQ :");
float iaq = bme.readIAQ();
Serial.print(iaq);
if (iaq < 50) Serial.println(" good");
else if (iaq < 100) Serial.println(" average");
else if (iaq < 150) Serial.println(" little bad");
else if (iaq < 200) Serial.println(" bad");
else if (iaq < 300) Serial.println(" worse");
else Serial.println(" very bad");
} else {
Serial.print("IAQ not ready, please wait about ");
Serial.print((int)(305000 - millis()) / 1000);
Serial.println(" seconds");
}
}
}
}结果
无IAQ数据

带IAQ数据

Arduino库函数功能列表
创建一个bme对象并写入I2C地址
DFRobot_BME680_I2C bme(0x77);初始化BME680和库
begin();开始数据转换
startConvert();读取转换的数据
update();支持IAQ读取
supportIAQ();带IAQ的读取转换的数据
iaqUpdate();查询IAQ转换是否完成, 完成返回1, 未完成返回0
isIAQReady();获取温度,单位是℃,数据带有两个小数点
readTemperature();获取压力,单位是pa,数据带有两个小数点
readPressure();获取湿度,单位是%rh,数据带有两个小数点
readHumidity();获取气体电阻的电阻值,单位是ohm,数据带有两个小数点
readGasResistance();获取海拔高度,单位是m,数据带有两个小数点
readAltitude();获取海平面气压参照,传入海拔
readSeaLevel(float altitude);获取矫正后的海拔,传入海平面参照
readCalibratedAltitude(float seaLevel);
兼容性测试
| MCU | 测试通过 | 测试失败 | 未测试 | 特别标注 |
|---|---|---|---|---|
| FireBeetle-Board328P | √ | 不支持IAQ | ||
| FireBeetle-ESP32 | √ | 不支持IAQ | ||
| FireBeetle-ESP8266 | √ | 支持IAQ | ||
| Leonardo | √ | 不支持IAQ |
Mind+ 上传模式编程
- 下载及安装软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
- 切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
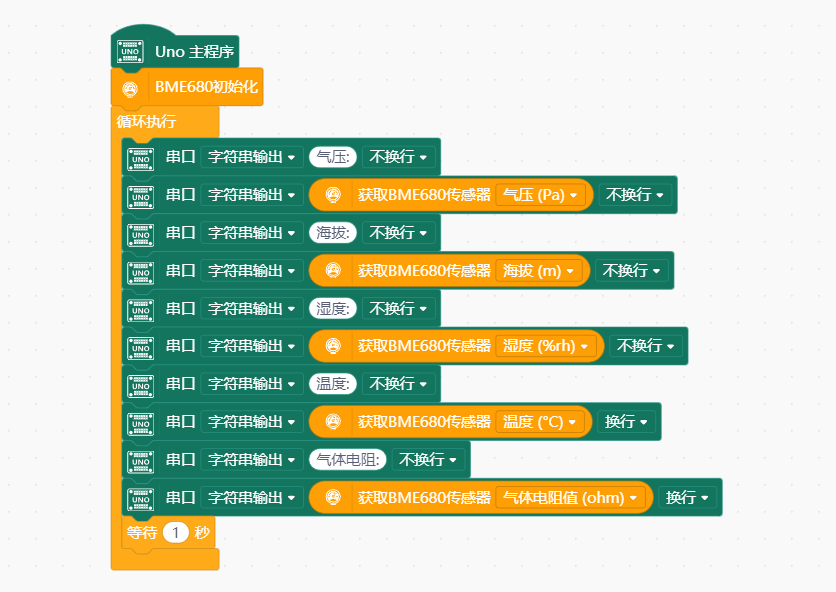
- “扩展”中选择“主控板”中的“Arduino Uno”。 “扩展”“传感器”中搜索选择“BME680模块”,详细教程:Mind+基础wiki教程-加载扩展库流程
- 进行编程,程序如下图:
- 菜单“连接设备”,“上传到设备”
- 程序上传完毕后,打开串口即可看到数据输出。详细教程:Mind+基础wiki教程-串口打印
Mind+ Python模式编程(行空板)
Mind+Python模式为完整Python编程,因此需要能运行完整Python的主控板,此处以行空板为例说明
连接图
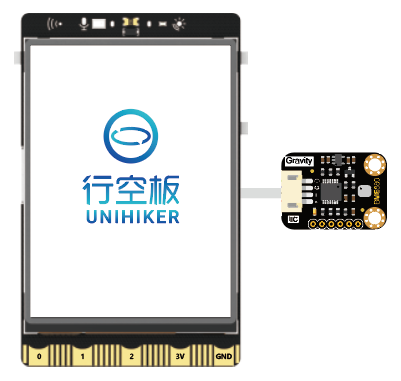
操作步骤
1、下载及安装官网最新软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“Python模式”。“扩展”中选择“官方库”中的“行空板”和“pinpong库”中的”pinpong初始化“和“BME680环境传感器”。切换模式和加载库的详细操作链接
3、进行编程
4、连接行空板,程序点击运行后,可在终端查看数据。行空板官方文档-行空板快速上手教程 (unihiker.com)

代码编程
以pinpong库为例,行空板官方文档-行空板快速上手教程 (unihiker.com)
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from pinpong.libs.dfrobot_bme680 import DFRobot_BME680
from pinpong.board import Board
import time
Board().begin()
p_bme680 = DFRobot_BME680()
while True:
p_bme680.get_sensor_data()
print((str("温度:") + str(p_bme680.data.temperature)))
print((str("气压:") + str(p_bme680.data.pressure)))
print((str("湿度:") + str(p_bme680.data.humidity)))
print((str("海拔:") + str(p_bme680.data.altitudu)))
print((str("气体电阻:") + str(p_bme680.data.gas_resistance)))
print("")
time.sleep(1)
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
